
Final Project: Clothes Folding Robot
Video Demonstrations
Below is a gallery of video demonstrations showcasing the robot folding various types of clothes:
T-shirt Folding
Dress Shirt Folding
Shorts Folding
Pants Folding
Project Overview
My final project involved constructing a clothes folding robot using a double linkage system. The robot is equipped with three actuated flaps designed to fold various types of clothing efficiently.
Robot Design
- Construction: The robot utilizes a double linkage system with three actuated flaps to fold clothes.
- Functionality: The robot can fold different types of clothing, including t-shirts, dress shirts, shorts, and pants.
Specific Features
Double Linkage System
The double linkage system was a critical component of the robot’s design. I extensively prototyped different link lengths and positions to optimize performance. The system was designed to allow easy modifications without needing to completely remake parts.
A challenge I encountered was the forces exerted on the links, which caused several to break. This was an oversight in the early design phase.

Below is a GIF showing the linkage in action:
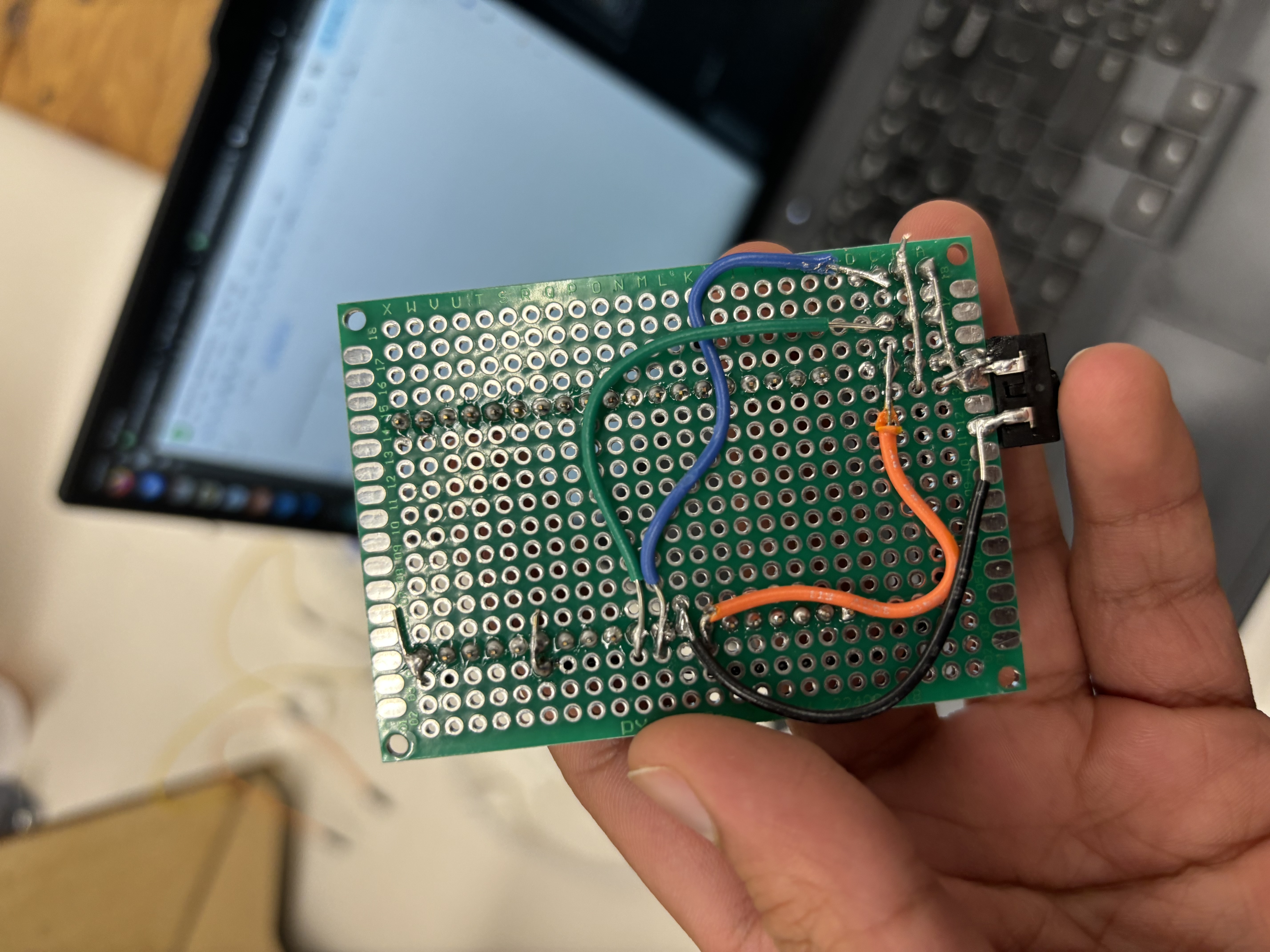
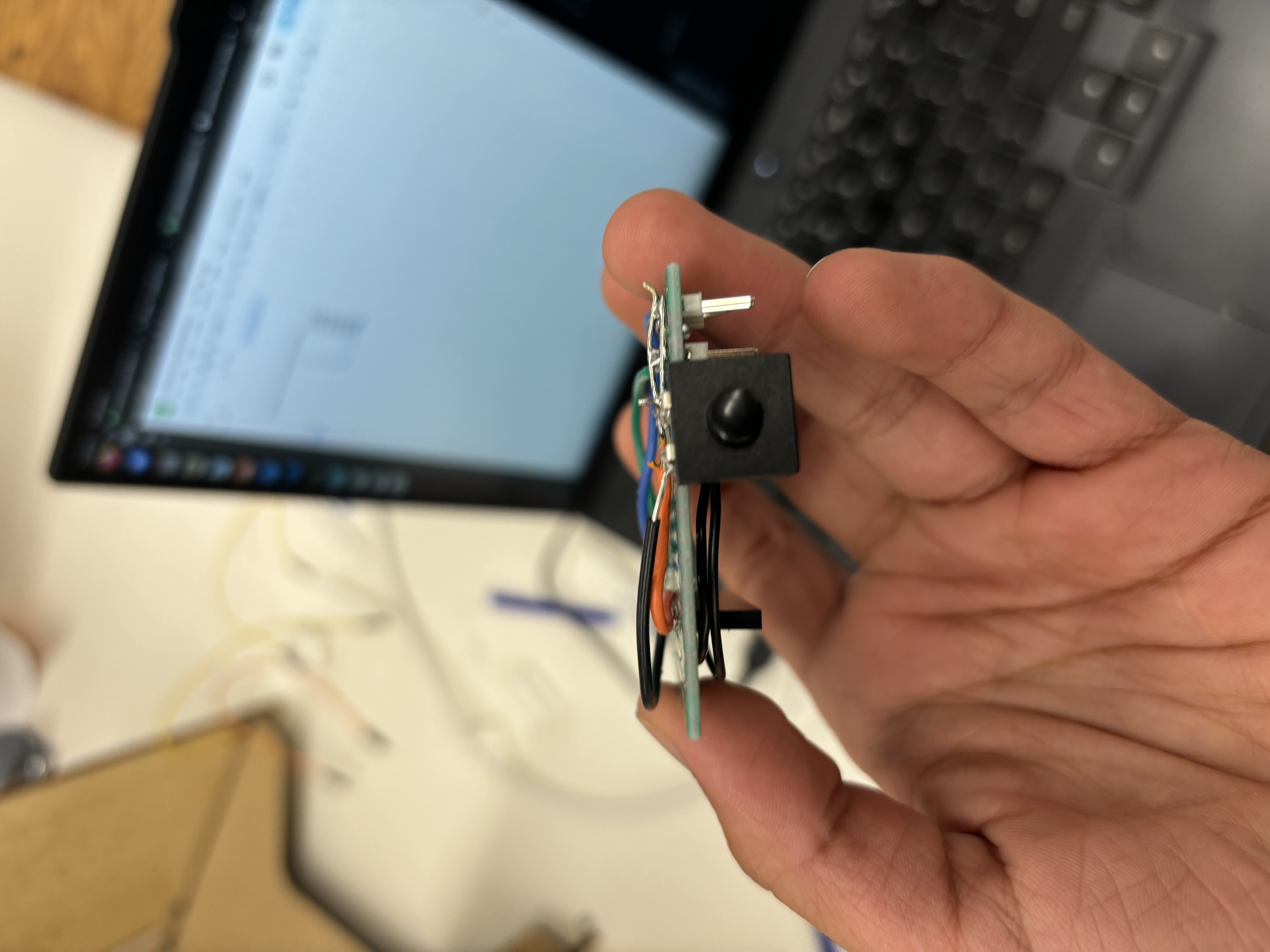
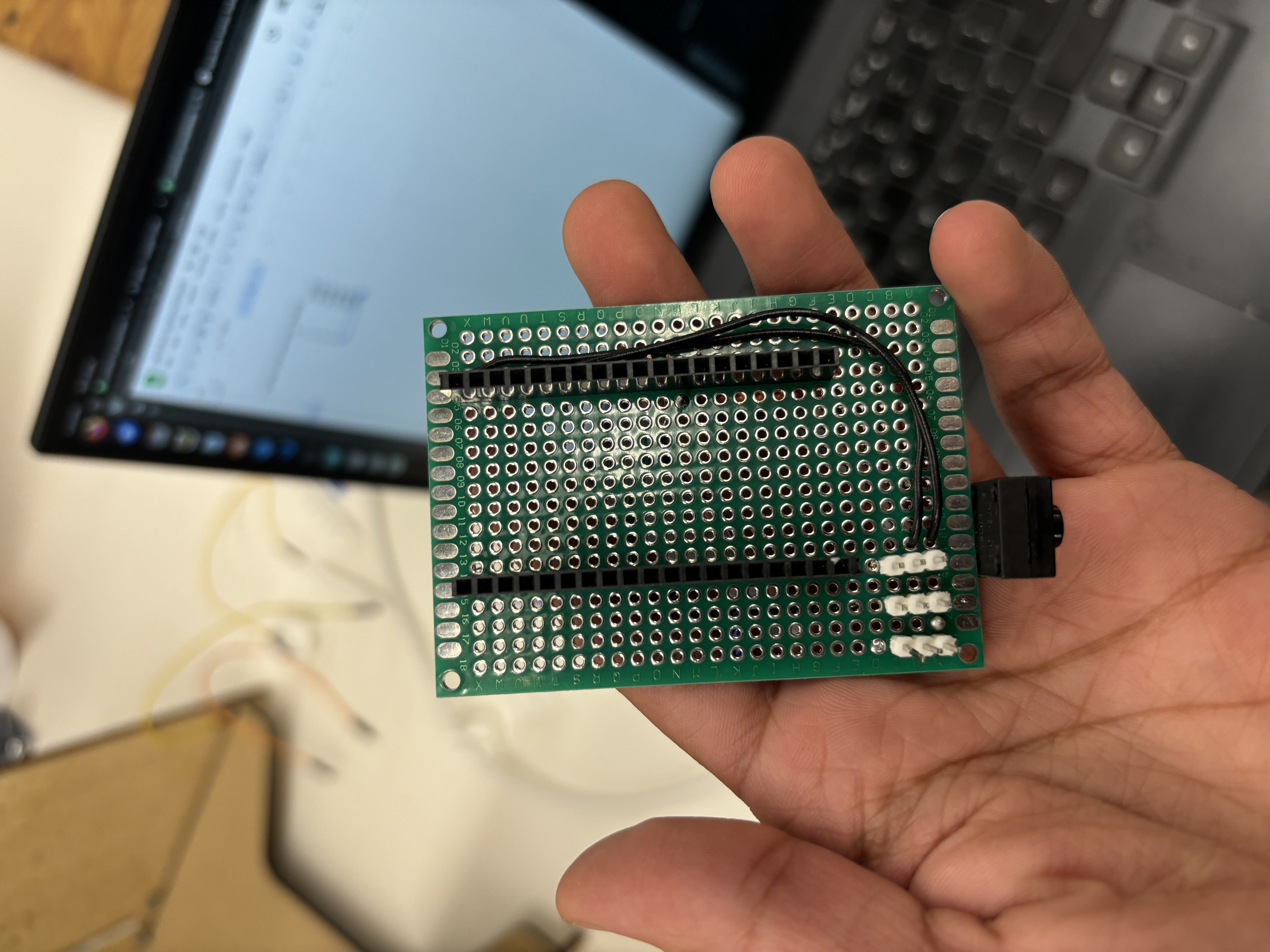
Wiring and Circuitry
Ensuring robust and clean wiring was imperative for portability. While wiring servos and buttons is relatively straightforward, I created a compact board for the wiring.
Overall Assembly
I think the biggest growth in this course was my ability to CAD and design complex systems. Below is a screenshot of the overall assembly modeled in Fusion:
.png)
In particular, I want to highlight the connecting mechanisms I leveraged to assemble this robot primarily using laser cut pieces.
- Finger Joints: The base frame of the robot is constructed using finger joints to allow the pieces to naturally slot in appropriate spots.
.png)
- 3D printed brackets: Throughout the assembly I additionally designed custom brackets leveraging the triangle pattern of the frame to allow for easy mounting.
.png)
.png)
Conclusion
The project successfully demonstrated the robot’s ability to fold various clothing items. Future improvements could include enhancing the speed and precision of the folding process.