
Week 10: Multi-Color Drawing Machine
Team: Kamryn Ohly, Zayid Alam, Rain YeYang, Aryan Naveen
Assignment Description
Work with your team to build a 2+ DoF drawing machine. Your team is encouraged to heavily modify the example hardware and software. At a minimum, you should implement a new end-effector.
Drawing machines will need to demonstrate:
- Ability to calibrate motor position (i.e. guarantee the “home” position is the same each time you power on the device)
- Precision: ability to draw a circle and mark its center point. Calculate percent error.
Project Overview
Our team developed an innovative drawing machine with two major contributions:
- A novel end-effector design enabling multi-pen drawing capabilities, allowing users to create artwork with different colors
- Implementation of a robust homing system using strategically placed limit switches for precise calibration
Technical Implementation
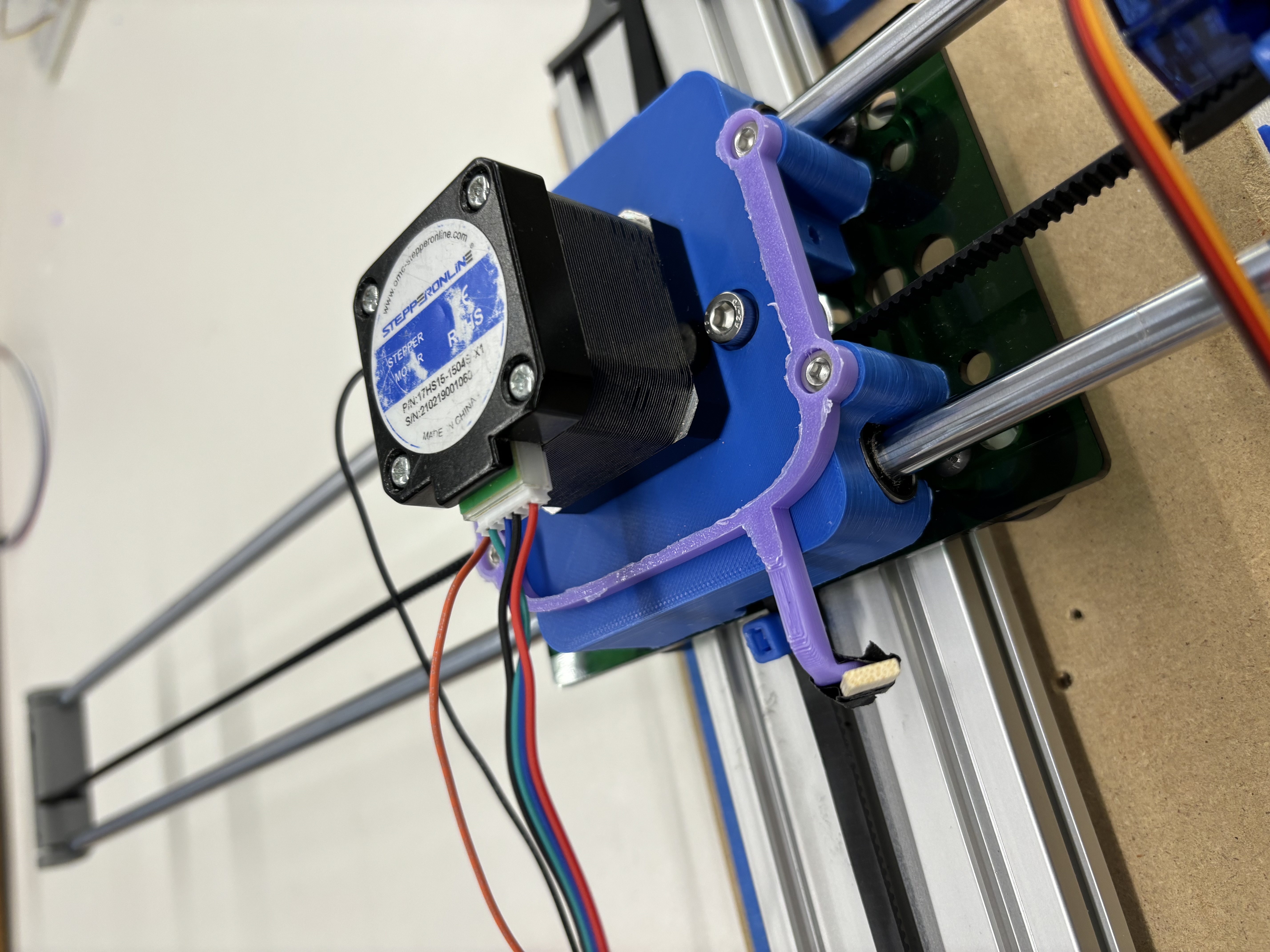
1. End Effector Design
Our innovative end effector design leverages the fact that pens can write effectively at various angles. Key features include:
- Servo-controlled rotation mechanism that positions different pens at precise angles
- Adjustable mounting system to accommodate pens of varying lengths
- Smooth transitions between different pens for multi-color drawings
Multi-Pen End Effector in Action
2. Homing Sequence Implementation
We developed a reliable homing system using limit switches for precise calibration:
- Two strategically placed limit switches:
- At the base of the gantry
- At the base of the second axis
- Custom-designed components to effectively trigger the limit switches
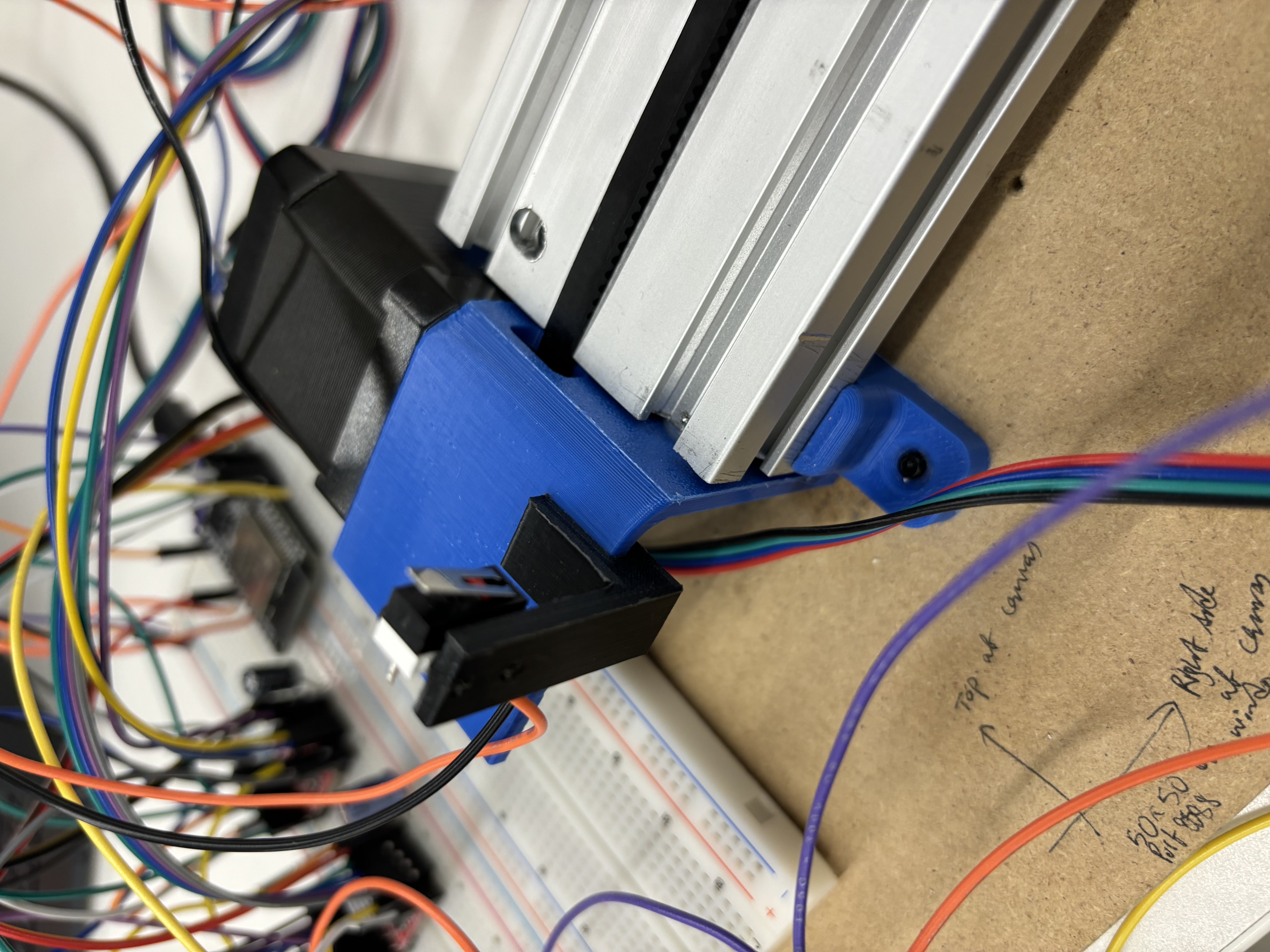
Limit Switch Mounting Locations and Components
Homing Sequence Test Demonstration
3. Position Mapping System
We implemented a sophisticated mapping system that:
- Converts stepper motor positions to precise X,Y coordinates
- Enables complex shape drawing capabilities
- Provides compatibility with G-code and other standard instruction formats
Code Implementation
Below is the core implementation of our drawing demonstration:
Click to see the microcontroller code
#include <AccelStepper.h>
#include <ESP32Servo.h>
// Motor 1
#define stepPin1 14
#define dirPin1 12
// Motor 2
#define stepPin2 26
#define dirPin2 27
// Pen Switch
#define penSwitch 5
// Servo Pin
Servo servo;
const int pin = 33;
// Limit switch y-axis
#define Y_AXIS_LIMIT_SWITCH_PIN 18
// x-axis limit switch
#define X_AXIS_LIMIT_SWITCH_PIN 19
// Use driver interface (step + dir)
#define motorInterfaceType 1
// Create stepper instances
AccelStepper stepper1(motorInterfaceType, stepPin1, dirPin1);
AccelStepper stepper2(motorInterfaceType, stepPin2, dirPin2);
// Global target position for both motors
int MAX_X = 25000;
int MAX_Y = 25000;
long x_delta = 5000;
long y_delta = 5000;
long middle_init = MAX_X/2;
class MyClass {
private:
// Private member variables
int privateVar;
public:
// Constructor
MyClass();
// Constructor with parameters
MyClass(int initialValue);
// Public methods
void setVar(int value);
int getVar();
// Other public methods
void doSomething();
};
void setup() {
Serial.begin(9600);
// Pen Btn
pinMode(penSwitch, INPUT_PULLUP);
// Servo
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
servo.setPeriodHertz(50);
servo.attach(pin, 500, 2400);
// Set speed and acceleration for motor 1
stepper1.setMaxSpeed(3000); // You can tweak this
stepper1.setAcceleration(1500); // And this too
// Set speed and acceleration for motor 2
stepper2.setMaxSpeed(1000);
stepper2.setAcceleration(500);
// Homing sequence
pinMode(X_AXIS_LIMIT_SWITCH_PIN, INPUT_PULLUP);
pinMode(Y_AXIS_LIMIT_SWITCH_PIN, INPUT_PULLUP);
stepper1.setCurrentPosition(0);
stepper2.setCurrentPosition(0);
}
bool y_axis_isHome = false;
bool x_axis_isHome = false;
bool isSetUp = false;
void loop() {
// Ensure that we are home!
if (!y_axis_isHome || !x_axis_isHome) {
// Home the y-axis
if (!y_axis_isHome) {
if (digitalRead(Y_AXIS_LIMIT_SWITCH_PIN) == LOW)
{
// IT HAS REACHED Y HOME
Serial.println("Y Home!");
// Now give a bit of space
stepper2.move(-10);
stepper2.setCurrentPosition(0);
y_axis_isHome = true;
} else {
Serial.println("Not activated.");
stepper2.move(400);
stepper2.runToPosition();
}
} else {
if (!x_axis_isHome) {
if (digitalRead(X_AXIS_LIMIT_SWITCH_PIN) == LOW)
{
// IT HAS REACHED Y HOME
Serial.println("X Home!");
// Give a bit of space
stepper1.move(10);
stepper1.setCurrentPosition(0);
x_axis_isHome = true;
} else {
Serial.println("Not activated.");
stepper1.move(-400);
stepper1.runToPosition();
}
}
}
} else {
// Move to middle of the drawing machine
if (!isSetUp) {
stepper1.moveTo(middle_init);
stepper2.moveTo(-1 * middle_init);
stepper1.runToPosition();
stepper2.runToPosition();
isSetUp = true;
} else {
// DO A FIGURE 8
// int pen = digitalRead(penSwitch);
// // Servo
// if (pen == 1) {
// servo.write(108);
// } else {
// servo.write(90);
// }
// // Motor 1: reverse direction at end
// if (stepper1.distanceToGo() == 0) {
// // target1 = -target1;
// x_delta = -x_delta;
// stepper1.moveTo(middle_init + x_delta);
// }
// // Motor 2: same logic
// if (stepper2.distanceToGo() == 0) {
// y_delta = -y_delta;
// stepper2.moveTo(-middle_init + y_delta);
// }
// // Run both motors
// stepper1.run();
// stepper2.run();
// Do a circle!!
static float theta = 0.0;
static float radius = 5000; // You can tweak this
static float stepSize = 0.02; // Smaller = smoother circle
int pen = digitalRead(penSwitch);
if (pen == 1) {
servo.write(108); // Pen down
} else {
servo.write(90); // Pen up
}
long x = middle_init + radius * cos(theta);
long y = -middle_init + radius * sin(theta);
stepper1.moveTo(x);
stepper2.moveTo(y);
stepper1.runToPosition();
stepper2.runToPosition();
theta += stepSize;
if (theta >= 2 * PI) {
theta = 0.0;
}
}
}
}
Final Demonstration
Final Drawing Machine Demonstration